See how the Leo Rover mobile robots did during the Space Resources Challenge.

Exploring the Moon? For the Leo Rover mobile robot it’s like another Tuesday. This time, the vehicle was used in the Space Resources Challenge prospecting the lunar surface, and behind the wheel was a team from Luxembourg – LUVMI-XR.
12 teams from Europe and Canada partook in the first round of the contest in the Netherlands in November 2021 with five winners moving on to the next phase of the competition, each of whom were awarded €75 000 to further develop their robots to the next phase of the event. The five best teams are the following:
Interestingly, the LUVMI-XR team is composed of several universities, research centers and companies, including SnT and SpaceR (Space Robotics Research Group) from the University of Luxembourg which is one of our customers whose activities we follow and root for.
Of the five finalists, the winning rover will be singled out in October, 2022, in Luxembourg, after the second and final round of the challenge, about which you can read here. The victor will receive €500,000 as well as the chance to be a part of an upcoming robotic mission to the Moon.
But before going further, let’s talk about what the event was actually about.
The challenge of the competition’s first stage was to develop a robot capable of driving across a simulated diverse lunar terrain and performing tasks.
The mission’s plot was set in 2028, when a robot landed on the southern pole of the Moon. The vehicle’s job was to traverse dusty, rugged terrain in quest for water and other valuable resources in challenging lighting conditions, which mimicked the Moon’s south pole environment.
The contestants had to guide their rovers across the unknown Moon surface to a target crater located several hundred meters from the lander, map the entire environment and search for the aforementioned usable resources, that is, first off, track their location, identify the best and safest routes to reach them, and then, collect information about the composition and properties of the rocks they found – all within the allotted time.

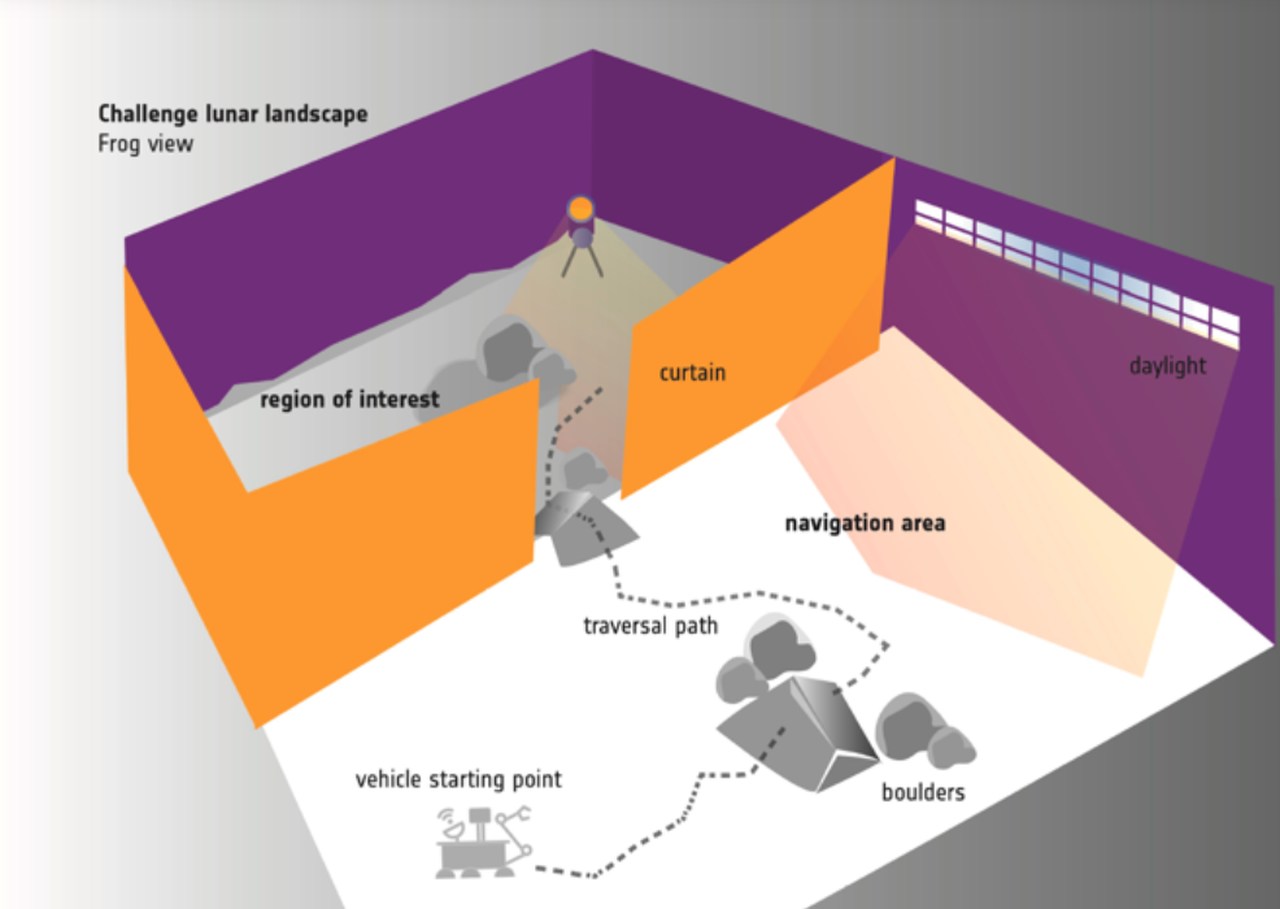
The participants weren’t allowed to physically enter the lunar terrain and could see it only through their robots’ cameras from a control room on “Earth”. The teams were provided with a basic map of the Moon site, featuring the area’s characteristics, that was used to visually navigate the terrain. The idea was to give the contestants pretty much the same amount and kind of local information they would get from satellite imagery during a “real” mission while still leaving surprises on a smaller scale. Black curtains kept the lunar terrain concealed from the teams so that they could see it only through their rovers’ cameras.
Some teams succeeded in this mission, others failed. Those whose rovers didn’t make it to the crater, encountered some technical issues, for example, battery problems, not enough lighting on their vehicles, or artificial signal delay. Each team had the opportunity to try out their technologies under great pressure, which was helpful to highlight any features that still needed improvement. But whether a team completed the mission or not, the experience itself was highly valuable to everyone.
A former aircraft hangar served as the competition site, in which 200 tons of lava rock were spread across the area as big as seven tennis courts, turning it into a Moon-like environment, including the main crater. Then, rocks were scattered around the terrain with their locations accurately geo-referenced.
The artificial lunar terrain, in which the contestants’ robots operated, was developed to obtain new technical solutions and operation scenarios for future exploration missions. The site consisted of a traverse zone and a region of interest (ROI), which are both illustrated below:
Here, you’ll find a detailed description of the competition’s first round.
During the competition, LUVMI-XR used two Leo Rover robots. How did they prepare their vehicles for the challenge?
Dave van der Meer from the team shared that to provide semi-autonomous control over the robots for guiding them across the unfamiliar lunar terrain with harsh lighting conditions, they used Ubuntu 18.04 with ROS Melodic.
As Dave puts it: “By semi-autonomous, we mean that we could either control the robots directly with the keyboard or navigate them by sending way-points to the robots that the Leo Rovers would try to reach autonomously. The network was set up to replicate the communication delay between Earth and the Moon so that each message would take 2.5 seconds to reach the robot, and the data from the robots would also take 2.5 seconds to get to our ground station. This delay made it difficult to rely on teleoperation only.”
When it comes to hardware, the LUVMI-XR team equipped their Leo Rovers with the Intel RealSense Depth D455 camera on a non-articulated mast connecting it to an Nvidia Jetson for image processing. One of the robots had a Jetson Xavier, while the other a Jetson Nano, which, for that task, was a bit insufficient. The team installed ROS Melodic and the RTAb-Map package on the Jetson devices to generate a 3D map of the terrain and execute visual-inertial SLAM.
To handle the dark lunar environment, an LED ring was attached to both Leo Rovers. The LED was controlled directly by the GPIO of the built-in Raspberry Pi. What’s more, the team connected two jumper wires from the Raspberry Pi’s GPIO to the Jetson so that they could reboot the device via ROS if the Jetson happened to crash.
.jpg)
Thanks to the team’s two-robot system – Resilient Exploration and Lunar Mapping System or, simply, REALMS – they made it to the final stage of the competition which took place in September, 2022, in Luxembourg. Dave explains that “the resilience in this system consists of the redundancy of operating modes, way-point following for longer traverses and teleoperation for more dangerous situations, and the redundancy through having two robots performing the same mapping task. The idea is to merge the map data and, therefore, we have the capacity to cover larger areas in a short amount of time while reducing the risk of having only one single system”. During the contest, the team managed to cover around 19.4% of the total terrain which was almost 1500 m2.
Sadly, the network also simulated loss of communication and, following the first disruption, the team could no longer connect to their second robot. Thus, they performed the whole mission mostly with just one vehicle. “For the final round of this challenge, we will increase the resilience of the system by adding more sensors and configuring the communication system between the robots in a more robust way.” – the team assures.
But the Leo Rover robots don’t serve only as competition vehicles. At SpaceR, at the University of Luxembourg, the vehicle is highly valuable for research projects and various experiments. Check it here.
We’re over the moon (pun intended ;)) that the Leo Rover robots were used in this unique competition and that LUVMI-XR advanced to the next round! To find out more, follow the University of Luxembourg on LinkedIn.
It wasn’t the first time a Leo Rover set its wheels on an “extraterrestrial” surface, though. The robot knows its way around exploring space, alright. Just simply check out our articles on ERC 2020, ERC 2021 and LunAres space missions and you’ll know what I’m talking about ;).
.jpg)

