Learn the most common locomotion types in mobile rovers and discover their pros and cons.


We live in a world of rapidly developing fields of technology and robotics. Companies go full speed ahead to compete in creating the best and most innovative approaches in their technology. There are a lot of different solutions when it comes to mobile robots and, more specifically, their locomotion types. In this article, we’re going to look at pros and cons of the most common ones.
Apart from being an important aspect of a mobile robot’s design, the locomotion system depends on the medium the robot moves in, technical criteria such as controllability, maneuverability, efficiency, stability, terrain conditions, and so on. There can be distinguished three main locomotion types used in ground mobile robots: wheels, legs, and tracks. Let’s find out what the strengths and weaknesses of each of them are.

Wheels play a crucial role in robots’ locomotion and are the most common mobility solution for any vehicle.
Using wheels is simpler than using legs or tracks, and it’s certainly easier to design, build and program when the robot is traveling on flat, unrugged terrain. Compared to other locomotion systems, wheels are considerably less expensive and their control requires less complexity. Additionally, wheels don’t entail having any great difficulties with balance since all the robot’s wheels are typically in contact with the surface.
Another advantage wheeled rovers show is good reliability and redundancy. Malfunctioning wheels can still provide sufficient mobility. Wheels are also energy efficient.
Wheels also have their drawbacks, though. The main one is that they don’t handle navigating over obstacles such as sharp surfaces, rugged terrain, or low friction areas particularly well. Basically, wheel-enabled systems also have difficulties in climbing slopes over 15° (but the good news is this problem doesn’t apply to Leo Rover, as you can see in the video).
Wheels are power-efficient and enable top speeds on a flat surface, but are not particularly suitable for crossing rough terrain. They tend to sink into the soft and loose soil, which leads to high soil resistance since the wheels have to compact and press against the surface.
Wheel-enabled rover systems can be categorized based on the number of wheels. There can be rovers with even one to eight wheels. An example of a four-wheel mobile vehicle is none other than Leo Rover, a photo of which was presented above :) And each of the robot’s wheels has its own individual motor and thanks to that, the vehicle can turn practically on the spot. See more details on Leo Rover’s wheels here.
Overall, the issues research on wheeled robots focuses on are traction and stability, control, and maneuverability. Since wheeled robots are typically designed to keep all their wheels in contact with the surface at all times, stability is not a big problem. So, robots with three wheels are enough to provide a stable balance, although robots equipped with two wheels can handle the task just fine. If more than three wheels are to be used, a suspension system is necessary. Its purpose is to allow all the wheels to maintain contact with the ground, especially when the robot is maneuvering over rough terrain.
Assuming a six-wheeled rover is the most common one, an eight-wheeled robot would have two additional wheels to distribute its weight between them and thus, reduce ground pressure, leading to less wheel sinkage. A rover with four wheels sacrifices mobility performance for weight reduction since much of the suspension system and two wheels can be removed.
Interestingly, when it comes to the design, not all wheeled robots use typical tires or metal wheels. An example of a unique wheel design is a Mecanum wheel – a tireless, omnidirectional wheel with a series of external rubber rollers mounted diagonally around its rim. A mix of differential wheel motions allows for vehicle motion in almost any direction with any rotation which is a significant advantage of this solution.


Another form of locomotion among the most common ones applied in mobile robots is legs.
Although usually more costly than wheels, there are some aspects in which legs excel, such as efficiency, transversality, and stability. Legged robots are also better suitable to move on soft and uneven surfaces – they don’t have to compact the sand while walking because their limbs can be lifted and moved through the air.
Another thing walking robots have the upper hand in (or should I say leg? ;)) is that they can easily handle obstacles or cracks found in their way.
In addition, compared to wheels, legged robots have better mobility when moving downhill.
Even when malfunctioning, a legged robot can still move as long as the failure doesn't affect the motors and the malfunctioning legs are stowed over the robot’s body to avoid contact with the surface.
A major drawback of legged mobility is its complexity, especially in terms of control. This increased complexity can also strain the computing power of the rover. Another disadvantage of legged mobility is the loss of energy to move the rover's mass vertically up and down with each step.
Although robots equipped with legs can deal with a wide array of various terrains, they have limited speed and, as mentioned, require complex instruments for control but also stabilization. Leg-enabled systems are considerably stable while moving over obstacles, but, in fact, stability is a significant issue in this kind of robot, as the body balance and gait are extremely important.
This system entails high energy consumption as for both lifting and the forward movement of the legs power is needed. Also,as mentioned earlier, legs for a robot are typically much moreexpensive than, for example, wheels.
And just like in the case of wheels, depending on the number of legs, there are many types of such robots – biped (humanoids), four-legged (quadruped), six-legged (hexapod), eight-legged, and so on.
Designs with two to eight legs are in the majority. The more limbs the robot is equipped with, the more redundant support, increased payload capacity, and safety it provides. But these advantages are accomplished at the expense of increased control complexity in terms of leg coordination, and also mechanical and power difficulties. A characteristic feature of biped robots is their anthropomorphic geometry. The static stability in this kind of legged robot can be achieved only up to a certain extent.

The last locomotion type we’re going to shed some light on is tracks. Tracked robots are commonly used in ground-based mobile applications such as military tanks and cars. This kind of system is now being considered for extraterrestrial surface exploration as well.
Tracked robots have much bigger ground contact areas, which plays a crucial role in improving their maneuverability on a loose surface compared to conventional robots with wheels. In addition, by covering bigger area, this system lowers the ground pressure and thus, is less destructive to the soil it moves on.
Robbots equipped with tracks also show better obstacle-traversing and slope-climbing capabilities.
Due to the aforementioned large ground contact area, changing the direction of the robot normally requires a skid turn, and therefore, a large portion of the track has to slide over the surface.
The slip/skid steering is also a downside of such configurations. Because of intense slippage during turning, it’s difficult to predict the robot’s exact COR, and due to ground friction, the precise change in direction and position is also variable.
What’s more, an approach of slid/skid on high-friction terrain can quickly exceed the torque value of the actuator used. The power efficiency of this approach is fairly acceptable on loose surfaces but, otherwise, very inefficient.
Generally, tracked rovers can handle uneven terrain well, but in comparison to wheeled robots, they are less efficient, slower, entail more mechanical intricacy, and cause more vibration.
Track systems are less reliable because of the potential jamming of the tracks and malfunctioning of the track units. Failure or damage to any of the tracks can cause partial or complete immobilization. However, track jamming in this system can be averted by operating at a low speed. With a wheel system, such compromises are less required. Either way, the validity of this argument depends on which motors driving the wheels, tracks, and legs are faulty. And the failure of all the motor units on one particular side of the robot will result in the complete immobility of any system.
Now that we’ve covered the three most common locomotion types in mobile robots, it’s worth mentioning that there can be also hybrids of those solutions. Although not so common, they are being developed and worked on.
As presented, each locomotion system offers its strong assets but entails having some disadvantages as well. And this is where hybrid robots come in. They’re a great solution to close the gap between different locomotion systems and make up for the limitations of a particular one.
A robot with hybrid mobility is a vehicle that has more than one form of mobility, in this case, wheels, legs, and/or tracks. Combining these multiple solutions allows to leverage the benefits of multiple forms of mobility.
The flexibility and adaptation of hybrid robots come at a price, though. Having more than one mobility system adds weight to the rover. There can be made some integrations, for example, the legs of a hybrid rover can serve as a suspension system, but there’s still a lot of additional hardware that has to be added. As a hybrid robot is heavier, in the case of a wheel-legged rover, the efficiency of driving is lower than in a purely wheeled rover, and the efficiency of walking is lower than in a purely legged robot. There’s also a matter of increased control and software complexity with a hybrid vehicle as, depending on the terrain, the robot needs to switch between the locomotion modes.
Now, let’s take a quick look at some examples of hybrid rovers :)
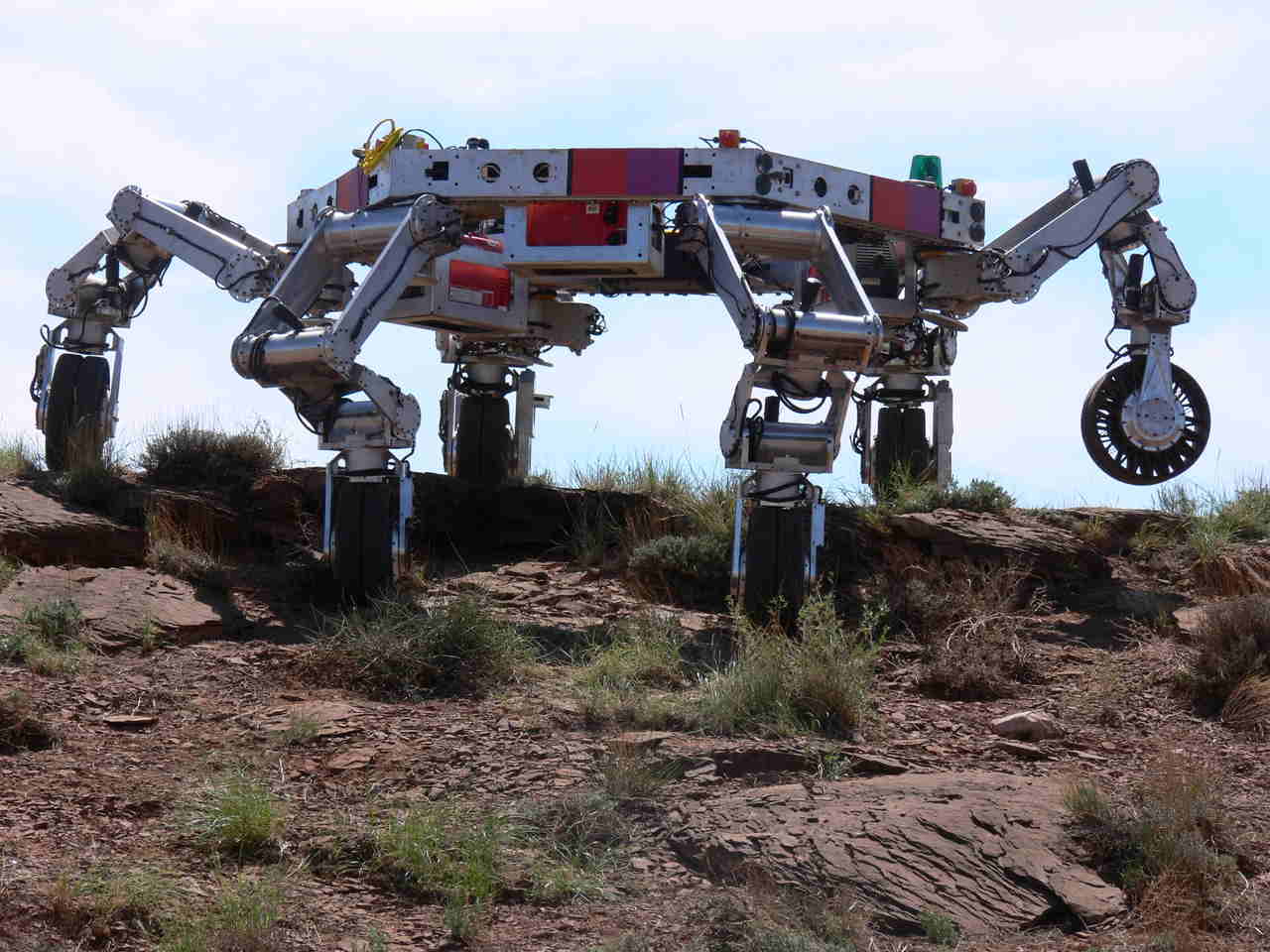
An example of a hybrid rover combining wheels and legs is ATHLETE which stands for All-Terrain Hex-Legged ExtraTerrestrial Explorer that NASA Jet Propulsion Laboratory’s been working on for years.
It’s a six-leg vehicle whose legs are connected to a hexagonal frame which also serves as a flat deck for cargo. Each face of the hexagonal frame is equipped with a pair of stereo cameras that enable to have a stereoscopic panoramic view of the vehicle’s surroundings. There’s a wheel on the end of each leg thanks to which the robot can roll on the surface. The wheels can also be locked and function as feet.
Another example of hybrid mobility is the AZIMUT robot, the concept and prototype of which have been developed at Université de Sherbrooke in Quebec, Canada.
AZIMUT is a mobile robotic platform that combines three types of locomotion: wheels, legs, and tracks. The robot consists of four independent leg-track-wheel articulations attached to the corners of a square frame. Depending on the position of the articulations, AZIMUT can adopt different locomotion modes. It’s also able to move sideways without changing the rover’s orientation. The robot’s also equipped with two retractable side handles to raise the vehicle and a mounting plate on the top of the chassis allowing to attach additional gear.

As stated, each of the presented locomotion types in mobile robots has its own assets and downsides. As a manufacturer of a wheeled rover, our opinion regarding the best solution of the presented three might be a bit biased. But we’ve been developing and working on Leo Rover for quite some time now, so we know its possibilities and limits like the back of our hands. And we’re constantly improving its design, doing our best to make sure it’s as reliable as it can be for you. Feel free to see the robot’s specification here.
.jpg)

